Introduction¶
This is a port of the eCos 3.0 real-time operating system for Enclustra’s Mars ZX3 Zynq module.
ECos¶
ECos is a configurable real-time operating system intended for use in embedded applications. The documentation for eCos 3.0, which is the most recent version of the system as well as the one ported to Mars ZX3, can be found at http://ecos.sourceware.org/docs-3.0/.
This document¶
For the most part, this document describes features specific to the Mars ZX3 port, however it also contains some information which do not directly refer to the port but may be helpful in working with the system.
Acknowledgements¶
We would like to thank Enclustra GmbH (http://enclustra.com) for co-sponsoring the port as well as Richard Rauch (http://www.itrgmbh.de) for his help in the porting effort.
The remarks of Garry Jeromson and Christoph Glattfelder of Enclustra GmbH, the manufacturer of the module, have been extremely helpful in making this document more complete and accurate.
Licence¶
(based on the eCos licence overview)
ECos is released under a modified version of the well known GNU General Public License (GPL). The eCos license is officially recognised as a GPL-compatible Free Software License. An exception clause has been added which limits the circumstances in which the license applies to other code when used in conjunction with eCos. The exception clause is as follows:
As a special exception, if other files instantiate templates or use macros or inline functions from this file, or you compile this file and link it with other works to produce a work based on this file, this file does not by itself cause the resulting work to be covered by the GNU General Public License. However the source code for this file must still be made available in accordance with section (3) of the GNU General Public License.
This exception does not invalidate any other reasons why a work based on this file might be covered by the GNU General Public License.
The license does not require users to release the source code of any applications that are developed with eCos.
Supported features¶
This eCos port provides the following software packages specific for Enclustra’s Mars ZX3 Zynq module:
- HAL package
- cache support
- debug UART driver
- serial port driver
- Ethernet driver
- I2C driver
- QSPI Flash driver
- RedBoot with Ethernet and Flash support
Version information¶
| Author | Content | Date | Version |
|---|---|---|---|
| Michael Gielda | Draft version | 10.09.2012 | 0.1 |
| Michael Gielda | Preliminary release | 15.09.2012 | 0.2 |
| Ziemowit Borowski | First release | 25.09.2012 | 0.3 |
| Michael Gielda | Review | 26.09.2012 | 0.4 |
| Michael Gielda | Corrections; ecc files; Appendix 1 | 28.09.2012 | 0.5 |
| Michael Gielda | Updates for secondary release | 10.10.2012 | 0.6 |
| Mateusz Majchrzycki | Added section on building a boot image | 25.10.2012 | 0.6.1 |
| Michael Gielda | Corrections | 25.10.2012 | 0.6.2 |
| Karol Gugala | Minor Updates | 10.01.2013 | 0.6.3 |
| Michael Gielda | Updates to feature test feedback | 11.01.2013 | 0.7 |
| Michael Gielda | Fixes for readthedocs | 18.04.2013 | 0.7.1 |
| Michael Gielda | Feedback from the community | 10.08.2013 | 0.7.2 |
| Michael Gielda | Appendix 2: MMU mappings for custom IP cores | 15.08.2013 | 0.7.3 |
Compiling the system¶
The port was prepared using Gentoo, Debian and Ubuntu Linux environments. The procedures described here should also work on other systems, but if you detect any errors or ommissions please e-mail us at contact@antmicro.com.
Prerequisites¶
Toolchain¶
The toolchain used to compile the port is Sourcery G++ Lite 2011.03-42, and can be obtained from the Mentor Graphics website.
It should be decompressed so that its bin directory is included in the PATH variable.
The proper availability of the toolchain can be checked by finding out if arm-none-eabi-gcc is available from the shell.
ecosconfig¶
The ecosconfig tool, available from the eCosCentric website, is used to generate the build tree from the main repository and is a mandatory requirement.
ecosconfig requires the tcl compiler to work. For Debian or Ubuntu development platforms the proper package is named tcl8.5, you can install it using: sudo apt-get install tcl8.5.
For Gentoo platforms the package is named dev-lang/tcl, you can install it using: sudo emerge dev-lang/tcl.
configtool (optional)¶
configtool is an optional GUI tool to facilitate the creation of eCos configuration tools files. It also may be downloaded from eCosCentric.
Warning
ecosconfig and configtool are 32bit applications, thus if you are using a 64bit OS you have to provide 32bit run-time libraries for compatibility. In a Ubuntu/Debian OS these could be installed using the command sudo apt-get install ia32-libs.
Source code and configuration files¶
The source of the port is provided on github.
By default, two general purpose configuration files are provided with the release. See Ready-made .ecc files for details.
Building eCos¶
Using ecosconfig¶
The main tool used for building the eCos operating system is ecosconfig (see Prerequisites).
The source tree of eCos, called eCos repository (like for example the source code tree provided in this release) is not built directly but instead first trimmed down and configured to suit the needs of a specific user and platform using ecosconfig.
This static pick-and-build procedure allows the user to exclude these elements of the system which are not necessary, thus reducing the memory footprint.
This mechanism also enables easy configuration of system-wide variables and driver specific features.
What exactly can be included, excluded or configured is determined by the contents of .cdl files residing side by side with all source files in the eCos repository (usually in the cdl directory on the same level as the src directory of a given package, like a driver for a particular interface).
Package list¶
The available packages which can be used in configuring eCos for Mars ZX3 are provided below, together with explanations which is responsible for what:
CYGPKG_HAL_ARM_XC7Z- Xilinx Zynq 70XX series specific infrastructureCYGPKG_HAL_ARM_XC7Z020- Xilinx Zynq 7020 EPP specific infrastructureCYGPKG_HAL_ARM_MARS_ZX3- Enclustra Mars ZX3 module specific infrastructureCYGPKG_DEVS_ETH_ARM_XC7Z- Xilinx Zynq Ethernet (Cadence GEM) driverCYGPKG_DEVS_I2C_ARM_XC7Z- Xilinx Zynq I2C (XIIC) driverCYGPKG_IO_SERIAL_ARM_XC7Z- Xilinx Zynq serial port driverCYGPKG_DEVS_QSPI_ARM_XC7Z- Xilinx Zynq QSPI driverCYGPKG_DEVS_FLASH_SPI_M25PXX- M25P Flash driver modified to support Winbond W25Q series Flash memories.
.ecc files¶
The output of ecosconfig are .ecc (eCos Configuration) files which are in essence tcl scripts storing all the information on what elements will be included in the system image and how they will be configured.
A handbook on ecosconfig exists to help in the manual creation of ecc files.
While creating .ecc files from scratch is possible, there exist several methods of making the process much simpler.
Templates and configtool¶
configtool (see Prerequisites) allows the user to build the system however they want using a graphical user interface, provided constraints in .cdl files describing the system structure are maintained.
While creating a new .ecc file it is easier to also use a predefined template representing common use scenarios, such as posix which represents a system which has all the necessary packages to run typical POSIX programs or redboot which understandably is used to build a binary of RedBoot, the eCos bootloader.
The supported templates are:
- default
- minimal
- all
- kernel
- lwip_net
- net
- posix
- redboot
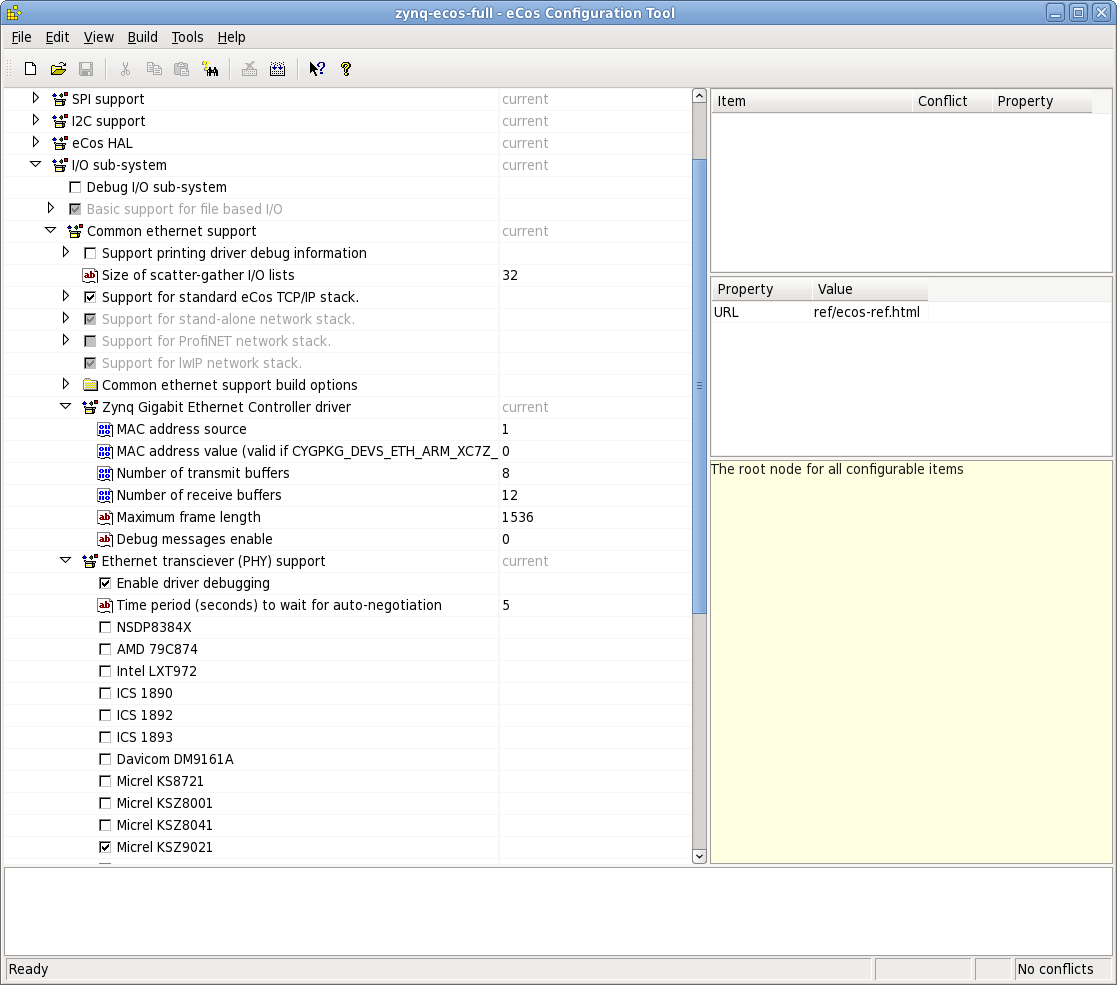
Configtool showing some of ZX3 specific options, such as the Micrel PHY
In order to select a template to base upon, use . The necessary packages can be added from .
Warning
Remember that the templates are just general scenarios, which may contain settings incompatible with the desired ones (baudrates, console mangling, debug console choice, presence of RedBoot ROM monitor). It is necessary to tweak them according to your needs. If you want to use a network connection through the Zynq Gigabit Ethernet Controller you have to enable at least one Ethernet tranceiver (PHY) support as presented in the figure entitled Configtool showing some of ZX3 specific options, such as the Micrel PHY
Ready-made .ecc files¶
Two ready-made .ecc files will be provided with this distribution.
The first one, mars_zx3_ecos.ecc, can be used to build the eCos kernel, to be linked against by a user application
The other, mars_zx3_redboot.ecc, can be used to build RedBoot (see RedBoot).
Building the kernel¶
Provided an .ecc file is generated properly (or supplied from outside), eCos can now be compiled to include all the elements and options as selected in the file.
A short shell script is proposed to make the compilation process easier:
Making the eCos kernel script.
export ECOS_REPOSITORY="{path/to/repository}/packages"
export PATH="$PATH:{path/to/toolchain}/bin"
mkdir -p build
rm -rf build/*
cd build
../ecosconfig --config=../mars_zx3_ecos.ecc tree
make
The resulting kernel files can be found in build/install/lib.
Building tests¶
The system features a testing mechanism where particular drivers and system abstractions can be checked for proper functioning.
The tests reside in the respective directories, for example devs/i2c/arm/xc7z/current/tests/i2ctest.c (the test that can be used to check if I2C runs properly - see I2C Test).
Building all tests is very simple, it is enough to use make tests instead of make in a procedure like the one above.
The compiled test binaries reside in the respective directories, like build/install/tests/devs/i2c/arm/xc7z/current/tests/i2ctest
Warning
Remember that tests are built only if the corresponding setting is enabled in the .ecc used file.
Tests cannot be generated for the redboot template, as they are in essence eCos applications.
Building an eCos application¶
With a compiled kernel files in the build/install/lib directory (see Building the kernel), a user space eCos application can be compiled and linked to it.
Building user space application script.
# Set paths.
KPATH="/path/to/kernel/build/directory" # modify this
TPATH="/path/to/toolchain/bin/directory" # modify this
# Set compiler path.
export PATH=${TPATH}:${PATH}
# Application source code.
FILES="file1.c file2.c file3.c"
# Set compiler options.
OPT="-mcpu=cortex-a9 -Wpointer-arith -Winline -Wundef -g -O2 \
-nostdlib -ffunction-sections -fdata-sections -fno-exceptions"
# Do compilation and link your application with kernel.
arm-none-eabi-gcc -g -I./ -g -I${KPATH}/install/include ${FILES} \
-L${KPATH}/install/lib -Ttarget.ld ${OPT}
RedBoot¶
RedBoot is the eCos bootloader that shares the driver infrastructure with eCos. It is, however, not limited to booting eCos and can just as well work as a standalone bootloader for other types of binaries. It has several interesting functionalities, such as support for Ethernet and SPI Flash.
Building RedBoot¶
To build RedBoot, prepare an .ecc based on the RedBoot template and build as normal (see Building the kernel). A RedBoot binary (in the ELF format) will reside in build/install/bin/redboot.elf.
Warning
If you built your system using the RedBoot template from scratch (not using an .ecc file) and use the none-eabi compiler like the one suggested in this manual, you need to set the -fno-builtin compiler option.
Otherwise a runtime error occurs.
Ethernet support in RedBoot¶
Ethernet in RedBoot can be used to download and run files on the ZX3 board, ping it or telnet to it. Remote boot via tftp is possible. A blog note will be written on use of Ethernet in RedBoot on Enclustra Mars ZX3.
By default, the board will use DHCP to acquire the IP address, this is however fully configurable before compiling the system as well as at runtime.
Warning
If you plug in the Ethernet cable after the system is booted, you will not be able to receive data until some data is sent first and the linkup can be detected. This is because RedBoot does not support interrupts.
IP setting in .ecc¶
The IP address of the board can be set using the value in configtool.
If DHCP is to be used, select ; otherwise uncheck it.
Also and may be of interest.
IP setting at runtime¶
The following commands can be used to manipulate the IP address at runtime:
ip_address -l <local_addr>- set static IP addressip_address -h <server_address>- set the IP address of the server to boot fromip_address -b- get IP address from DHCP
SPI Flash support in RedBoot¶
A Flash Image System (FIS) can be created with RedBoot and subsequently modified. RedBoot can perform self-modification, put ELF files there and run them, etc. A blog note will be written on use of Flash in RedBoot on Enclustra Mars ZX3.
Usage¶
After building a eCos kernel (see Building the kernel), a user application must be linked against it to produce a runnable program (see Building an eCos application). The program can be directly uploaded to the module (see Loading binaries to the module) or included in a boot image file (see Building a boot image file).
Building a boot image file¶
The boot image is the file which is used to program the Flash memory on the Mars ZX3 module. The boot image contains the FSBL (First Stage Bootloader), the SLCR configuration data for the Zynq EPP, the bitstream for the PL and the user application or the Second Stage Bootloader. Only the FSBL is required to create the boot image. Other components are optional.
The boot image file is built with the bootgen tool from the Xilinx Design Suite. To create the image, a simple text file in the .bif format, containing a list of files used in the process, is needed. An example .bif file is presented below:
the_ROM_image:
{
[bootloader]fsbl.elf
system_top.bit
redboot.elf
}
The filenames used in the .bif file may also contain an absolute path if they are located in another directory than the .bif file. Next, bootgen should be used to build the boot image:
bootgen -image bootimage.bif -o i output.bin
After the boot image is created, it may be uploaded to the Mars ZX3 module using the Enclustra MCT software.
Further details about the process of creating a boot image can be found in the Zynq-7000 EPP Software Developers Guide on page 29.
Loading binaries to the module¶
Binaries can be loaded to the ZX3 module using a Xilinx JTAG, xmd and gdb. A non-Xilinx JTAG with openocd can also be used; this will be the subject of an upcoming blog note in the Zynq series.
What follows is a simple procedure that can be used to run a precompiled binary on the ZX3 module.
Note
The special gdb commands were removed since the primary release as they are no longer needed, and thus the procedure does not differ from uploading binaries to any other board.
- Run
xmdandgdbin separate terminals. - Connect to the board with
xmdusingconnect arm hw. - Upload the binary with
gdbusing the commandsload [elf filename]andc(continue).
QSPI Test¶
The W25Q QSPI Flash test contains a test case repeatedly erasing and filling the onboard Winbond W25Q QSPI Flash with a checkerboard and inverse checkerboard of 0xAA and 0x55.
It is based on a test for a similar, very popular model of Flash memory, the M25Q, which is part of the eCos mainline (packages/devs/flash/spi/m25pxx/test/m25pxx_test.c).
Since the Flash on board of the ZX3 module contains a bitstream and FSBL, which need an external program to replace, the test does not modify the part of the Flash (memory addresses under 0x00400000). This is a feature peculiar to this platform which would require changes not only to header definitions but in several places inside the test, so the M25P test was not modified and instead a w25qxx_test.c file is provided separately with the distribution.
The file can be compiled as a user-space eCos program linked against a kernel with Flash support (i.e. a kernel built with CYGPKG_IO_FLASH in the cdl_configuration part on the top of the ecc file). The compilation procedure for a user-space application can be found in Building an eCos application.
This is a good way to test such a compilation procedure, however, for convenience, a binary of the test (w25qxx_test) is also included in the package.
I2C Test¶
The test mimicks the functioning of the Xilinx BSP-based test provided for the ZX3 module by Enclustra, i.e. communicates with the on-board EEPROM to read module data and then tests the RTC, both of which reside on the module and are connected to the I2C bus.
The test is part of the standard eCos test suite and will be built using the procedure described in Building tests for any .ecc which includes the I2C package (CYGPKG_IO_I2C).
Appendix 1: Clock speeds¶
The default CPU clock frequency on the MARS ZX3 board is 400MHz. The RTC system timer is clocked by CPU frequency divided by 4. The required timer interrupt period is 1ms.
System initialization parameters are set as described above in:
packages/hal/xc7z/var/current/cdl/hal_arm_xc7z.cdl:
Clock settings
cdl_option CYGHWR_HAL_ARM_SOC_PROCESSOR_CLOCK {
display "Processor clock rate"
flavor data
default_value 400000000
description "
The processor can run at various frequencies.
These values are expressed in Hz. It's the CPU frequency."
}
cdl_component CYGNUM_HAL_RTC_CONSTANTS {
display "Real-time clock constants"
flavor none
cdl_option CYGNUM_HAL_RTC_NUMERATOR {
display "Real-time clock numerator"
flavor data
default_value 1000000000
}
cdl_option CYGNUM_HAL_RTC_DENOMINATOR {
display "Real-time clock denominator"
flavor data
default_value 1000
}
cdl_option CYGNUM_HAL_RTC_CPU_CLOCK_DIVIDER {
display "Divider of CPU frequency distributed to RTC"
flavor data
default_value 4
}
cdl_option CYGNUM_HAL_RTC_PERIOD {
display "Real-time clock period"
flavor data
calculated ((CYGHWR_HAL_ARM_SOC_PROCESSOR_CLOCK/
CYGNUM_HAL_RTC_CPU_CLOCK_DIVIDER)/
CYGNUM_HAL_RTC_DENOMINATOR)
description "Value to program into the RTC clock generator. \
OS timer must be 1 ms."
}
}
CYGNUM_HAL_RTC_NUMERATOR and CYGNUM_HAL_RTC_DENOMINATOR determine that the timer interrupt period is:
CYGNUM_HAL_RTC_NUMERATOR/CYGNUM_HAL_RTC_DENOMINATOR nanoseconds.
CYGNUM_HAL_RTC_PERIOD is a value written directly to the clock divider to obtain the required interrupt frequency. It is calculated just like the CPU clock using the CYGHWR_HAL_ARM_SOC_PROCESSOR_CLOCK, CYGNUM_HAL_RTC_CPU_CLOCK_DIVIDER and CYGNUM_HAL_RTC_DENOMINATOR values.
Appendix 2: MMU mappings for custom IP cores¶
This port is aimed at a highly configurable Zynq platform, where the user is free to create custom connections through the FPGA fabric to peripherals which can then be accessed via memory using mappings.
The port features only a basic set of mappings to support the fixed onboard peripherals while any custom mappings have to be done manually to reflect the bistream configuration of the FPGA.
The hal_mmu_init function in mars_zx3_misc.c is the best place to add such mappings on top of the ones for RAM, IO, SLCR and on-chip RAM.
To map additional memory regions (e.g. for custom ipcores), the ARC_X_ARM_MMU_SECTION macro can be used.
An example for a 0x70A00000 .. 0x70AFFFFF mapping is given below:
ARC_X_ARM_MMU_SECTION(0x70a, 0x70a, 1, ARC_ARM_UNCACHEABLE,
ARC_ARM_UNBUFFERABLE, ARC_ARM_ACCESS_PERM_RW_RW);